[OOP] 객체 지향 프로그래밍의 특징 - 다형성 (Polymorphism)
객체 지향 프로그래밍의 특징 중 다형성(Polymorphism)의 개념 정리

객체 지향 프로그래밍에 대한 전체적인 내용은 #객체 지향 프로그래밍이란?를 참고
이전에 설명한 특징인 상속에 대해서는 #객체 지향 프로그래밍의 특징 - 상속 (Inheritance) 참고
추가적으로, 추상화에 대해서는 #객체 지향 프로그래밍의 특징 - 추상화 (Abstraction) 참고
다형성(Polymorphism)의 개념
 다형성은 객체 지향 프로그래밍의 꽃이라고 할 수 있으며, 상황과 환경에 따라서 달라지는 성질을 의미한다.
다형성은 객체 지향 프로그래밍의 꽃이라고 할 수 있으며, 상황과 환경에 따라서 달라지는 성질을 의미한다.
다형성(多形性)이란, 한자 그대로 어떤 객체의 속성이나 기능이 상황에 따라 여러 형태를 가질 수 있는 성질을 의미한다.
위의 이미지처럼 상황에 따라 남자의 역할이 자식에게는 부모, 회사에서는 팀장, 동호회에서는 리더 등 상황과 환경에 따라 달라지는 것과 비슷하다고 할 수 있다.
즉, 어떤 객체의 속성이나 기능이 그 맥락에 따라 다른 역할을 수행할 수 있는 객체 지향의 특성을 의미한다.
대표적인 예로 메서드 오버라이딩(overriding)과 메서드 오버로딩(overloading)이 있다.
1
2
3
4
5
6
7
8
public interface Vehicle {
public abstract void start();
void moveForward(); // public abstract 키워드 생략 가능
void moveBackward();
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
public class Car implements Vehicle { // 이동 수단을 구체화한 자동차 클래스
@Override
public void start() {
System.out.println("🚗");
}
@Override
public void moveForward() {
System.out.println("🚗 <- <- <- <- <- <- 🚗");
}
@Override
public void moveBackward() {
System.out.println("🚗 -> -> -> -> -> -> 🚗");
}
}
위의 코드와 같이 앞서 설명한 추상화에서 본 것처럼 메서드 오버라이딩을 사용하면 같은 이름의 moveForward()와 moveBackward()를 각각의 클래스의 맥락에 맞게 재정의하여 사용할 수 있다.
즉, 같은 이름의 메서드가 상황에 따라 다른 역할을 수행하는 것이다.
또한, 하나의 클래스 내에서 같은 이름의 메서드를 여러 개 중복하여 정의하는 것을 의미하는 메서드 오버로딩도 이와 같은 맥락이라고 할 수 있다.
앞서 언급한 메서드 오버라이딩과 메서드 오버로딩도 다형성의 중요한 예시 중에 하나지만, 객체 지향의 맥락에서는 이것보다 더 중요한 다형서으이 정의는 아래와 같다.
객체 지향 프로그래밍에서 다형성이란, 한 타입의 참조 변수를 통해 여러 타입의 객체를 참조할 수 있도록 만듣 것을 의미한다.
좀 더 구체적으로, 상위 클래스의 타입의 참조 변수로 하위 클래스의 객체를 참조할 수 있도록 하는 것이다.
위의 정의만 봐서는 이해하기 어려운 부분이 있기 때문에 아래와 같은 예시를 들면,
사람이 음식을 먹는다.
위의 문장에서 음식은 상황에 따라서 피자 또는 치킨, 햄버거 등 다양한 형태의 음식이 될 수 있다.
또한 사람 또한 홍길동 또는 임꺽정 등이 될 수 있다.
즉, 음식과 사람은 그 상황과 맥락에 따라서 모습을 바꿀 수 있는데, 앞서 설명한 다형성의 맥락 또한 마찬가지이다.
이동 수단 예제
지금까지 쭉 사용해왔던 이동 수단을 다시 예시로 들어보면, 이동 수단은 자동차가 될 수도 있으며, 오토바이가 될 수도 있다.
다르게 표현하면, 자동차는 자동차이다.와 자동차는 이동 수단이다.라는 두 명제는 모두 참이다.
오토바이의 경우도 마찬가지이며, 이동 수단이라는 범위 안에 자동차와 오토바이를 하나로 묶을 수 있게 된다.
즉, 이동 수단은 작은 개념들을 품을 수 있는 포괄적인 개념이라는 의미이다.
정리하자면,
객체 지향 프로그래밍에서 다형성이란, 앞서 설명한
이동 수단과 같은 넓은 범위의 타입, 즉 상위 클래스 타입의 참조 변수로 그것과 관계있는 하위 클래스들을 참조할 수 있는 능력이다.
결합도가 높은 경우
코드로 보기
이전에 #객체 지향 프로그래밍의 특징 - 상속 (Inheritance) 파트에서 사용한 예제를 통해 진행
1
2
3
4
5
6
7
8
9
10
11
12
public class Main {
public static void main(String[] args) {
// 원래 사용했던 객체 생성
Car car_1 = new Car();
MotorBike motorBike = new MotorBike();
// 다형성을 활용한 객체 생성 방식
Vehicle car_2 = new Car();
// --- 이하 생략 ---
}
}
위의 코드에서 볼 수 있듯, 상위 클래스 타입의 참조 변수로 하위 클래스 객체를 참조하는 것의 의미를 조금 더 구체적으로 이해할 수 있다.
원래 사용했던 객체 생성 방식은 하위 클래스의 객체를 생성하여 하위 클래스 타입의 참조 변수에 할당했지만, 다형성을 활용한 객체 생성 방식에서는 하위 클래스의 객체를 생성하여 상위 클래스 타입의 참조 변수 car_2에 할당해주고 있다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
public class Main {
public static void main(String[] args) {
// 상위 클래스 타입의 객체 배열 생성
Vehicle vehicles[] = new Vehicle[2];
vehicles[0] = new Car();
vehicles[1] = new MotorBike();
for (Vehicle vehicle : vehicles) {
System.out.println(vehicle.getClass()); // 각각의 클래스를 호출해주는 메서드
// class Car
// class MotorBike
}
}
}
다형성을 활용한 방식이 유용한 이유는, 위와 같이 다형성을 활용하면 여러 종류의 객체를 배열로 다루는 일이 가능해지기 때문이다.
앞서 작성했던 것 처럼, 상위 클래스 Vehicle 타입의 객체 배열을 생성해주면, 이제 해당 타입의 참조 변수는 Vehicle 클래스와 상속 관계에 있는 모든 하위 클래스들을 그 안에 담아줄 수 있다.
원래 자바에서 배열의 개념이 하나의 같은 타입으로 이루어져 있는 자료 구조라는 사실을 알고 있다면, 이렇게 다형성을 활용하여 하나의 타입만으로 여러 가지 타입의 객체를 참조할 수 있어 보다 유연하게 코드를 작성하는 것이 가능해진다.
추가적으로 Driver 클래스를 새롭게 정의해본다면,
1
2
3
4
5
6
7
8
9
10
11
12
13
public class Driver {
void drive(Car car) {
car.moveForward();
car.moveBackward();
car.openWindow();
}
void drive(MotorBike motorBike) {
motorBike.moveForward();
motorBike.moveBackward();
motorBike.stuntAction();
}
}
위와 같이 정의한 Driver 클래스를 사용한 Main 클래스의 경우, 아래와 같다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
public class Main {
public static void main(String[] args) {
Car car = new Car();
MotorBike motorBike = new MotorBike();
Driver driver = new Driver();
driver.drive(car);
// 앞으로 전진한다.
// 뒤로 후진한다.
// 모든 창문을 연다.
driver.drive(motorBike);
// 앞 바퀴를 들고 전진한다.
// 뒤로 후진한다.
// 스턴트 묘기를 보인다.
}
}
위의 예제와 같이 Driver 클래스의 코드는 매우 간단하다.
즉, 매개 변수로 자동차나 오토바이 객체를 전달받아 운전하는 것이다.
이렇게 하나의 객체가 다른 객체의 속성과 기능에 접근하여 어떤 기능을 사용할 때, 우리는 “A 클래스는 B 클래스에 의존한다”라고 표현한다.
이미지로 보기
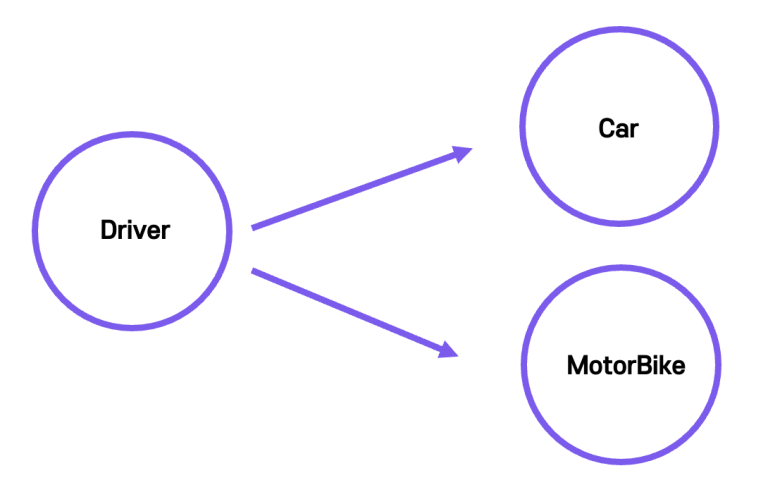
위의 이미지와 같이 표현할 수 있다.
Driver 클래스가 Car 클래스와 MotorBike 클래스에 의존하고 있다고 설명할 수 있다.
즉, Driver 클래스와 다른 두 개의 클래스가 서로 직접적인 관계를 가지고 있는데, 이러한 상황을 “객체들 간의 결합도가 높다”라고 표현한다.
결합도가 높아서 생기는 문제점
객체들 간의 결합도가 높다은 상태라면 객체 지향적인 설계를 하는 데 매우 불리하다.
만약에, 지금처럼 이동 수단이 두 가지가 아닌, 수 십 또는 수 백개라면 아래의 코드와 같이 똑같은 코드를 반복적으로 작성해야 할 것이다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
public class Driver {
void drive(Car car) {
car.moveForward();
car.moveBackward();
car.openWindow();
}
void drive(MotorBike motorBike) {
motorBike.moveForward();
motorBike.moveBackward();
motorBike.stuntAction();
}
void drive(Bus bus) {
bus.moveForward();
bus.moveBackward();
}
void drive(Train train) {
train.moveForward();
train.moveBackward();
}
// 기타 엄청나게 반복적인 코드들 ...
}
위와 같은 반복적인 문제 뿐만이 아니라, 새로운 상황이 발생해서 MotorBike에서 MotorCycle로 클래스가 변경되야 하는 경우라면,
1
2
3
4
5
6
7
8
9
10
11
12
13
public class Driver {
void drive(Car car) {
car.moveForward();
car.moveBackward();
car.openWindow();
}
void drive(MotorCycle motorCycle) {
motorCycle.moveForward();
motorCycle.moveBackward();
motorCycle.stuntAction();
}
}
Driver 안에 매개 변수로 전달되는 참조 변수의 타입과 참조 변수를 수정할 수 밖에 없는 상황이 발생한다.
또한 코드가 많아질수록 이 작업은 굉장히 힘들어질 수 밖에 없다.
마치 운전자가 운전을 배웠는데, 이동 수단이 바뀔 때마다 새롭게 운전을 배워야 하는 상황과 같다고 할 수 있다.
ex) 테슬라(4륜 승용차) → 테슬라 운전법 / 소나타(4륜 승용차) → 소나타 운전법
결합도가 느슨한 경우
위와 같이 결합도가 높아서 생기는 문제점을 객체 지향 프로그래밍의 특성인 추상화, 상속, 그리고 다형성을 활용하여 프로그래밍을 설계할 때 역할과 구현을 구분하여 객체들 간의 직접적인 결합을 피하고, 느슨한 관계 설정을 통해 보다 유연하고 변경이 용이한 프로그램 설계를 가능하게 만들 수 있다.
이 부분이 객체 지향 프로그래밍의 하이라이트이자 핵심이라고 할 수 있다.
코드로 보기
1
2
3
4
5
// 이동 수단의 역할 정의
public interface Vehicle {
void moveForward();
void moveBackward();
}
위의 코드와 같이 우선 추상화에서 봤었던 것처럼 Vehicle 인터페이스를 통해 이동 수단의 역할을 추상화하고,
1
2
3
4
5
6
7
8
9
10
11
12
// 이동 수단 인터페이스를 구현
public class Car implements Vehicle {
@Override
public void moveForward() {
System.out.println("🚗 <- <- <- <- <- <- 🚗");
}
@Override
public void moveBackward() {
System.out.println("🚗 -> -> -> -> -> -> 🚗");
}
}
1
2
3
4
5
6
7
8
9
10
11
12
// 이동 수단 인터페이스를 구현
public class MotorBike implements Vehicle {
@Override
public void moveForward() {
System.out.println("🏍️ <- <- <- <- <- <- 🏍️");
}
@Override
public void moveBackward() {
System.out.println("🏍️ -> -> -> -> -> -> 🏍️");
}
}
각각 Car 클래스와 MotorBike 클래스에서 기능들을 구현한다.
여기까지는 앞서 추상화 파트와 동일하다.
1
2
3
4
5
6
7
public class Driver {
// 매개 변수로 인터페이스 타입의 참조 변수를 전달
void drive(Vehicle vehicle) {
vehicle.moveForward();
vehicle.moveBackward();
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
public class Main {
public static void main(String[] args) {
Car car = new Car();
MotorBike motorBike = new MotorBike();
Driver driver = new Driver();
driver.drive(car);
// 🚗 <- <- <- <- <- <- 🚗
// 🚗 -> -> -> -> -> -> 🚗
driver.drive(motorBike);
// 🏍️ <- <- <- <- <- <- 🏍️
// 🏍️ -> -> -> -> -> -> 🏍️
}
}
여기서 핵심이 되는 부분은 위의 코드인 Driver 클래스이다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
// Vehicle 인터페이스 적용 전
public class Driver {
void drive(Car car) {
car.moveForward();
car.moveBackward();
car.openWindow();
}
void drive(MotorBike motorBike) {
motorBike.moveForward();
motorBike.moveBackward();
motorBike.stuntAction();
}
void drive(Bus bus) {
bus.moveForward();
bus.moveBackward();
}
void drive(Train train) {
train.moveForward();
train.moveBackward();
}
// 기타 엄청나게 반복적인 코드들 ...
}
1
2
3
4
5
6
7
8
// Vehicle 인터페이스 적용 후
public class Driver {
// 매개 변수로 인터페이스 타입의 참조 변수를 전달
void drive(Vehicle vehicle) {
vehicle.moveForward();
vehicle.moveBackward();
}
}
위와 같이 한눈에 봐도 코드의 중복이 사라지고, 코드가 훨씬 간결해진 것을 확인할 수 있다.
핵심은 drive() 메서드로 전달되는 매개 변수의 타입을 상위 클래스인 인터페이스 타입 Vehicle로 변경한 것이다.
이제 다형성을 활용하여 작성된 drive() 메서드의 매개 변수로 인터페이스를 구현한 객체라면 무엇이든 전달이 될 수 있게 되었다.
마찬가지고 메서드의 수가 많아지고 코드 라인이 길어진다면 그 효과는 더욱 강력할 것이다.
이미지로 보기
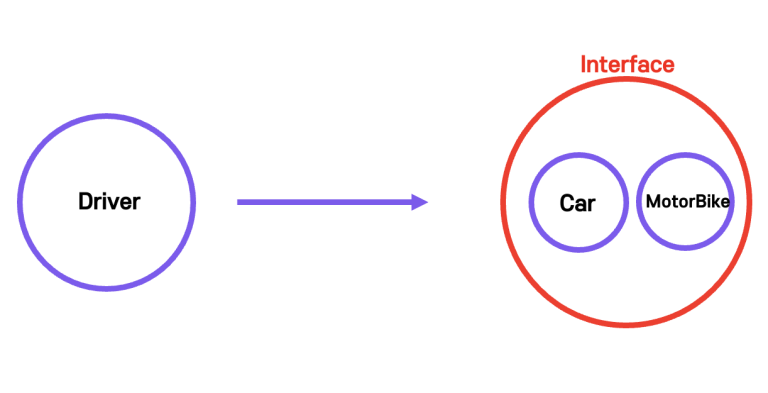
앞서 확인한 결합도가 높은 경우는 Driver 클래스가 Car와 MotorBike 클래스 각각과 직접적으로 연결되어 강한 결합도를 보였지만, 이제는 Vehicle 인터페이스를 통해 간접적으로 연결되어 결합도가 낮아졌다.
따라서 Driver 클래스는 더 이상 각각의 클래스 내부의 변경이나 다른 객체가 새롭게 교체되는 것을 신경쓰지 않아도 인터페이스에만 의존하여 수정이 있을 때마다 코드 변경을 하지 않아도 된다.
 운전자가 운전하는 법을 매번 새롭게 배우지 않아도 변경된 이동 수단을 이용하는데 아무런 문제가 없다.
운전자가 운전하는 법을 매번 새롭게 배우지 않아도 변경된 이동 수단을 이용하는데 아무런 문제가 없다.
해당 목차에서의 설명이 앞서 설명한 추상화와 다형성의 특성을 활용한 역할과 구현의 구분이자, 보다 유연하고 변경이 용이한 소프트웨어 설계를 가능하게 하는 객체 지향 프로그래밍의 꽃이라고 할 수 있다.
하지만, 아직 모든 문제가 해결된 것은 아니다.
의존 관계 주입 (Dependency Injection)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
public class Main {
public static void main(String[] args) {
Car car = new Car();
MotorBike motorBike = new MotorBike();
Driver driver = new Driver();
driver.drive(car);
// 🚗 <- <- <- <- <- <- 🚗
// 🚗 -> -> -> -> -> -> 🚗
driver.drive(motorBike);
// 🏍️ <- <- <- <- <- <- 🏍️
// 🏍️ -> -> -> -> -> -> 🏍️
}
}
위의 실행 클래스의 코드를 보면, 여전히 코드에서 객체를 생성할 때 new Car()와 new MotorBike()처럼 객체에 직접적으로 의존하고 있어서, 해당 객체를 다른 객체ㅗ 변경할 시, 코드의 변경이 불가피하다.
즉, 객체 간의 높은 결합도로 보이는 상황이 다시 발생한 것이다.
Java의 경우, 위의 문제를 해결하기 위해 등장한 것이 바로 의존관계 주입(Dependency Injection)이라 부르는 스프링 프레임워크의 핵심적인 개념이다.
참고 사이트
다른 특징들 중 하나인 캡슐화에 대해서는 #객체 지향 프로그래밍의 특징 - 캡슐화 (Encapsulation)에서 이어서 설명